Open CV
ROS (Robot Operating System)
Gazebo
Video :
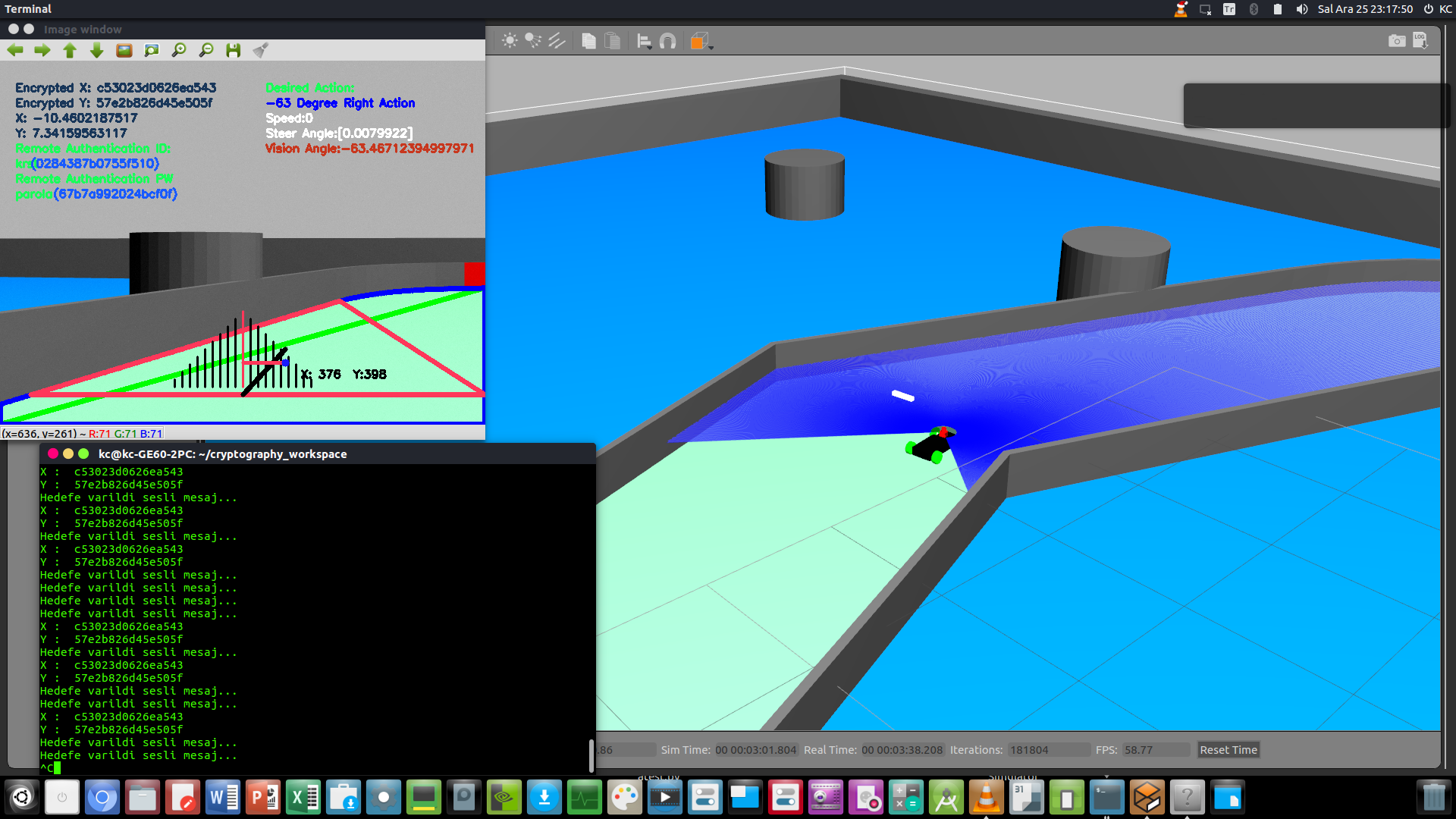
System's enhanced form :(Insufficient GPU capacity slows the Screen Recorder. Therefore system test videos taken by phone camera.)
Sistem 19. saniye görüntü işleme tekniklerinin sol komut vermesine rağmen kriptografik modülden X:-7 Y:3 koordinatlarına geldiğinde sağa dönme komutu verilmesi sebebiyle dönüş yapmaktadır.